Home
Home

Many objections to belief-state planning are framed as concerns about scalability. In practice, they are concerned about visibility. Systems that avoid explicit belief do not eliminate uncertainty; they merely conceal it. This concealment can appear efficient, but it comes at a cost that is paid later often at the point where decisions matter most.
This article is the third part of the Belief-State Engine series.
Part-1 established why large language models (LLMs), by themselves, are not planning machines, and why decision-making under uncertainty requires an explicit state abstraction.
Part-2 introduced the belief state as that abstraction, clarifying how belief differs from memory, context, or latent representations.
In this part, we examine a common and often decisive objection: belief states grow combinatorially, and therefore cannot scale. The observation is correct. The conclusion is not.
Why Belief States Are Combinatorial by Construction
A belief state is not a single estimate of the world. It is a probability distribution over multiple plausible world states, conditioned on incomplete and noisy observations.
Let the environment admit a set of possible states:
A belief state is defined as:
This update shows that while the belief is defined as a posterior over the current state, its evolution depends explicitly on the previous belief and the transition model, with prior states marginalized through summation.
Each uncertain variable multiplies the hypothesis space. Each partial observation reduces uncertainty, but rarely collapses it entirely.
The result is a belief space whose dimensionality grows with:
- the number of latent variables
- the degree of partial observability
- and the stochasticity of transitions and observations.
This growth is not accidental. It directly reflects the structure of the problem being modeled.
To make this distinction concrete, it is useful to visualize how uncertainty changes the object of planning. The following diagrams illustrate the progression from single-state reasoning to belief-space reasoning, and clarify why combinatorial structure arises naturally once uncertainty is treated as an explicit, first-class construct rather than an implicit side effect. This is explained using the diagram below.
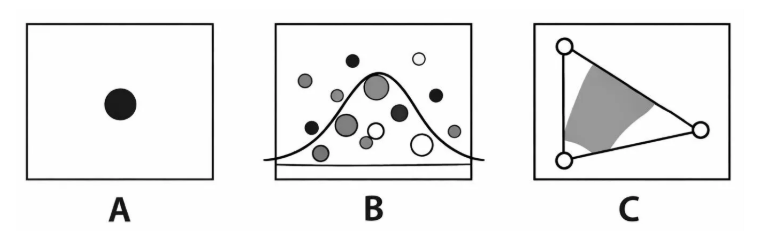
[A] Single Known State
The system assumes the environment is in one definite state. Planning proceeds as if observations are complete and unambiguous. This model is simple but fragile under partial observability.
[B] Belief as a Distribution
The system maintains multiple plausible states simultaneously, each with an associated probability. Uncertainty is acknowledged, but reasoning still refers back to individual states.
[C] Belief as the State
The probability distribution itself becomes the state of the system. Planning operates over belief updates rather than world-state transitions, making uncertainty explicit and persistent.
Summary Interpretation
- A collapses uncertainty prematurely.
- B acknowledges uncertainty but still reasons in the original state space.
- C elevates uncertainty to a first-class object of planning.
The progression from A-to-C explains why belief-state systems are inherently higher-dimensional and why that dimensionality is not accidental, but necessary.
The apparent “explosion” occurs because uncertainty is no longer hidden. It is represented explicitly.
Implicit Uncertainty Does Not Remove Complexity
Many contemporary AI systems, particularly LLM-centric agents, do not maintain explicit belief states. Instead, uncertainty is handled implicitly through latent representations and token-level probabilities.
This approach appears scalable because:
- uncertainty is compressed
- contradictory hypotheses are averaged
- and commitments are made early.
However, implicit uncertainty is not removed; it is absorbed into internal representations (e.g., latent activations or token distributions), which are typically not exposed as an explicit, persistent belief object that can be directly inspected and updated under a defined probabilistic semantics.
When uncertainty is implicit:
- it cannot be inspected
- it cannot be bounded
- and it cannot be reasoned about explicitly.
This often leads to over-confident action selection in regimes where evidence is insufficient.
In practice, this manifests as hallucination; the model commits to a single interpretation of incomplete evidence and continues reasoning as if alternative hypotheses no longer exist. Once this collapse occurs, subsequent tokens reinforce the chosen path, even when later information should have reduced confidence rather than increased it.
Where the Cost Is Paid
The correct question is not whether uncertainty is expensive. It is where the cost is paid.
- Single-state systems pay later, through brittleness.
- Implicit systems pay silently, through premature commitment.
- Belief-state systems pay upfront, through computation.
Belief-state planning makes the cost explicit and therefore manageable.
Combinatorial Does Not Mean Unbounded
A common misconception is that belief-state systems require enumerating all possible worlds. In practice, this is not the case.
Operational belief-state systems rely on:
- factorization of state variables
- conditional independence assumptions
- probability mass pruning
- approximate inference
- and domain-constrained transitions.
For example, in a security domain, a transition model may explicitly forbid belief updates that assume lateral movement before credential validation or privilege escalation, thereby constraining belief evolution to sequences that are feasible within the domain’s operational rules.
These techniques are foundational in decision-theoretic planning and are formalized in the literature on Partially Observable Markov Decision Processes.
The belief space is large, but it is structured, constrained, and actively managed.
The Architecture of Managed Complexity
While the mathematical “ideal” of a belief state involves navigating a continuous simplex of all possible worlds, practical engineering does not require us to boil the ocean. If Part 2 of this series gave us the calculus of belief, Part 3 requires the architecture of it. To prevent the combinatorial explosion from grounding the engine, we treat the belief state as a dynamically sparse object. By utilizing Probability Mass Pruning, we effectively “forget” hypotheses that fall below a critical confidence threshold, ensuring the engine focuses its computational budget on the 5-10 most likely realities rather than 5 million improbable ones .
Furthermore, we leverage Domain-Constrained Transitions to act as a logical filter. In a security or safety-critical domain, the laws of the system serve as a “legal move generator” that zeroes out impossible state transitions before they are even calculated. This turns a theoretically infinite search space into a structured, manageable graph. We aren’t just calculating uncertainty; we are shaping it through rigorous structural assumptions like factorization and conditional independence . This is how we achieve intellectual honesty without sacrificing operational performance.
Why This Matters in Adversarial and Safety-Critical Domains
In domains such as cybersecurity, autonomy, and defense, uncertainty is intrinsic rather than incidental.
A system must reason about:
- multiple plausible attacker states
- incomplete telemetry
- deceptive or adversarial observations
- and delayed or noisy feedback.
Collapsing uncertainty prematurely is not an optimization.
It is a source of systematic error.
Belief-state representations allow:
- risk-aware action selection
- evidence-driven belief revision
- and controlled exploration under uncertainty.
These properties are difficult to reproduce with purely latent or heuristic approaches.
A Concrete Intuition (Why This Matters)
Consider a simple adversarial testing scenario of making a lateral movement decision:
- Is the credential valid or decoy?
- Is the host domain-joined or isolated?
- Is outbound traffic monitored or unrestricted?
Each variable is uncertain. Each observation is partial. Collapsing any of these prematurely in favor of lateral movement decision leads to brittle planning.
The belief-state does not choose early. It maintains competing hypotheses until evidence resolves them.
This is not inefficiency. It is discipline.
Why the Scalability Objection Is Incomplete
Saying “belief states are combinatorial” is accurate but incomplete.
The real question is:
What structure is allowed to manage that combinatorial uncertainty?
Some approaches attempt to:
- collapse belief into latent embeddings
- average hypotheses implicitly
- or rely on heuristic selection.
Others preserve belief explicitly but constrain how it evolves.
Only the latter class admits:
- auditable uncertainty
- principled updates
- and controlled decision-making under ambiguity.
Reframing the Scalability Objection
The correct reframing is not:
Belief states are too large to scale.
It is:
Explicit uncertainty requires structure, not elimination.
Combinatorial belief states are the price paid for intellectual honesty in uncertain environments.
What This Implies (Without Solving It Yet)
If belief states are necessary but expensive, then the solution is not to abandon them.
The solution must instead:
- preserve explicit belief
- constrain its evolution
- and delegate heuristic reasoning without collapsing uncertainty.
This boundary between belief maintenance and policy generation is where modern systems must be designed carefully.
That boundary is the subject of Part-4.
Continuation
The combinatorial nature of belief states is not a defect to be engineered away. It is the consequence of choosing to represent uncertainty explicitly rather than implicitly. Any system operating under partial observability must pay this cost somewhere; belief-state planning chooses to pay it transparently and under control.
If belief states are necessary but computationally demanding, the appropriate response is not to collapse them into latent representations, nor to average away competing hypotheses. The response is to preserve explicit belief while constraining how it evolves and how decisions are derived from it.
This separation between belief maintenance and policy generation is not optional. It is the boundary that determines whether a system reasons under uncertainty or merely reacts to it.
In Part-4, we will examine how belief-state engines and LLMs can be combined across this boundary, and why treating them as substitutes rather than complements leads to systematic failure.
About FireCompass
FireCompass is an Agentic AI platform for autonomous penetration testing and red teaming across Web, API, and infrastructure. It discovers shadow assets and web applications, safely validates what is exploitable, and connects findings into multi-stage attack paths with near-zero false positives. Unlike traditional scanners, FireCompass uncovers credential reuse, business-logic flaws, privilege escalation, and app-to-app or app-to-network lateral movement. It can operate autonomously or with expert-in-the-loop validation. FireCompass has 30+ analyst recognitions across Gartner, Forrester, and IDC, and is trusted by Fortune 1000 enterprises.
See What’s Actually Exploitable in Your Environment. Claim Free AI Pen Testing Credits: firecompass.com/explorer